

Робот Серворук
Это рука робота, которую можно обучить выполнять определенные действия бесконечно долго.
Проект серворуки состоит из двух частей:
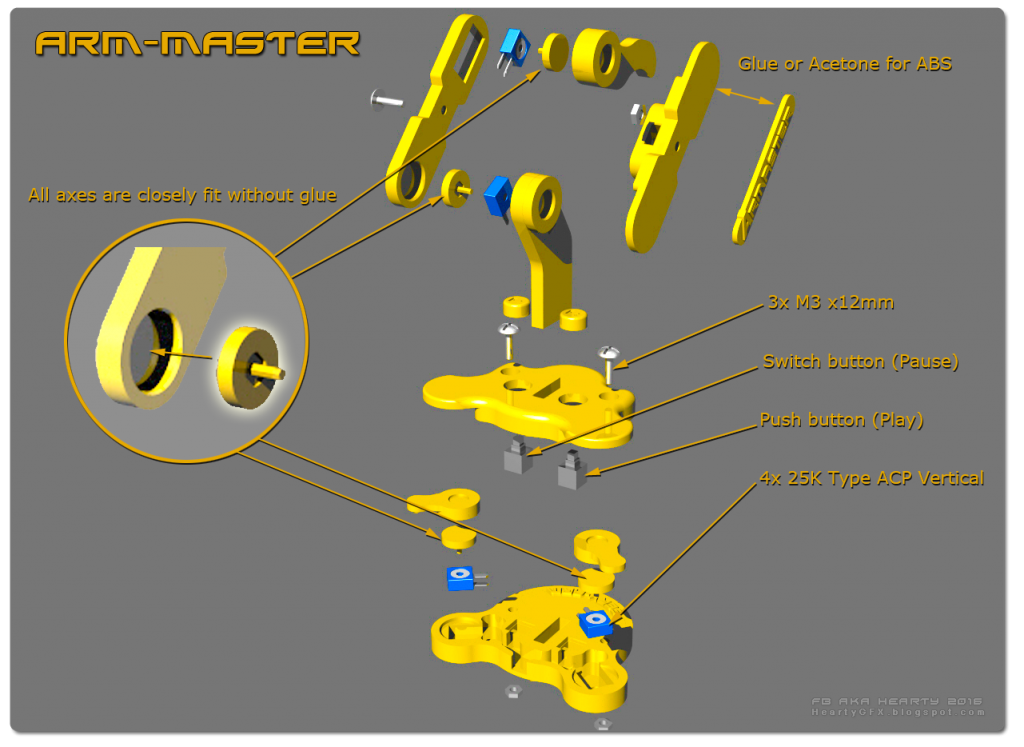
- Арммастер — контроллер управления.
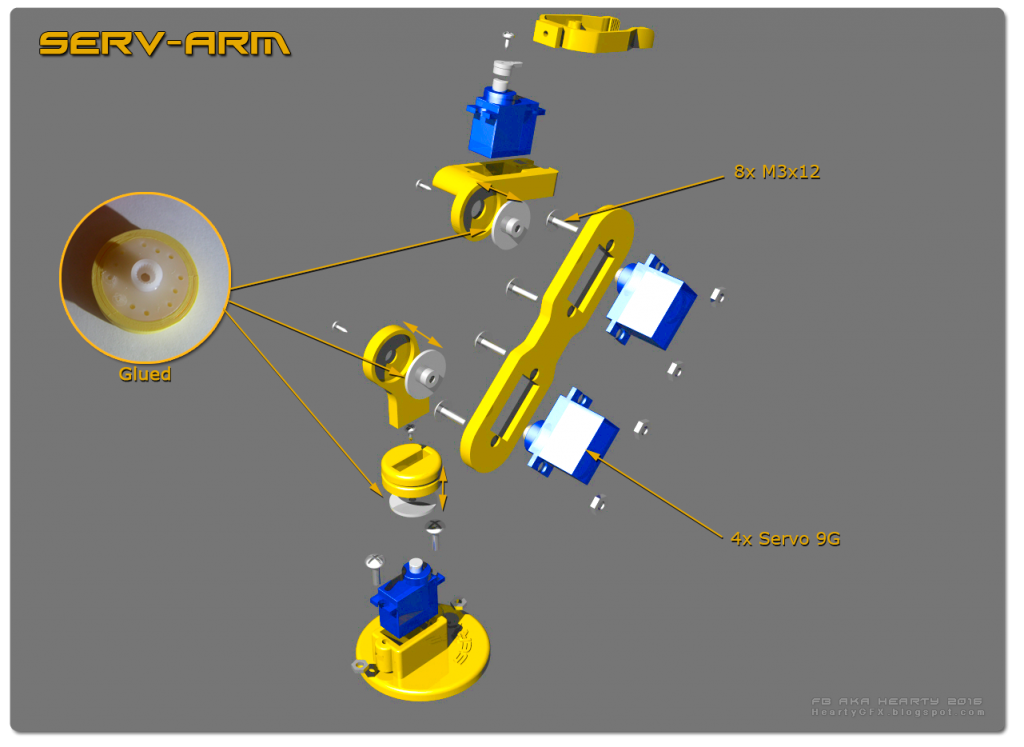
- Серворука — сама рука, управляемая контроллером.
Список деталей
Для печати на 3Д принтере:
2_x_Ctrl_levier_V3
8_x_Half-AxePot
Avant_Bras
base
Base_Ctrl_V3
Base_Epaule-Rotate_V3
Base_Top_Ctrl_V3
Bras
Ctrl_Avant_Bras
Ctrl_Bras
Ctrl_Epaule
Ctrl_Renfort_Bras
Cube_10mm
Epaule-Rot_V3
Logo
pente
pente_pied
pente_pied1
Pince_V4
Электроника и другие детали:
1 x Arduino Pro Mini или Arduino Nano или Arduino uno тут
4 x Серводвигатель SG90 тут
4 x Переменный резистор ACP «spain» 20К или 25К.
2 x Резистор 10К
1 x Кнопка нажимная
1 x Кнопка-переключатель
1 x Макетная плата для размещения электроники (можно обойтись и без нее).
1 x Блок питания 5V
11 x Болт и винт M3x12
Провода
Припой / олово
Сборка
Сборка элементов не должно быть трудной. Потенциометры следует приклеить к корпусу, но после того, как вы все соберете и проверите, что поворот потенциометра не приводит к излишнему повороту серводвигателя. Но даже если вы это не проверите, это можно будет исправить в коде.
Примечание:
Рычаги (вертикальная часть), Арммастера и Серворуки, просто вставляютяс с усилием в прямоугольник основного корпуса без клея.
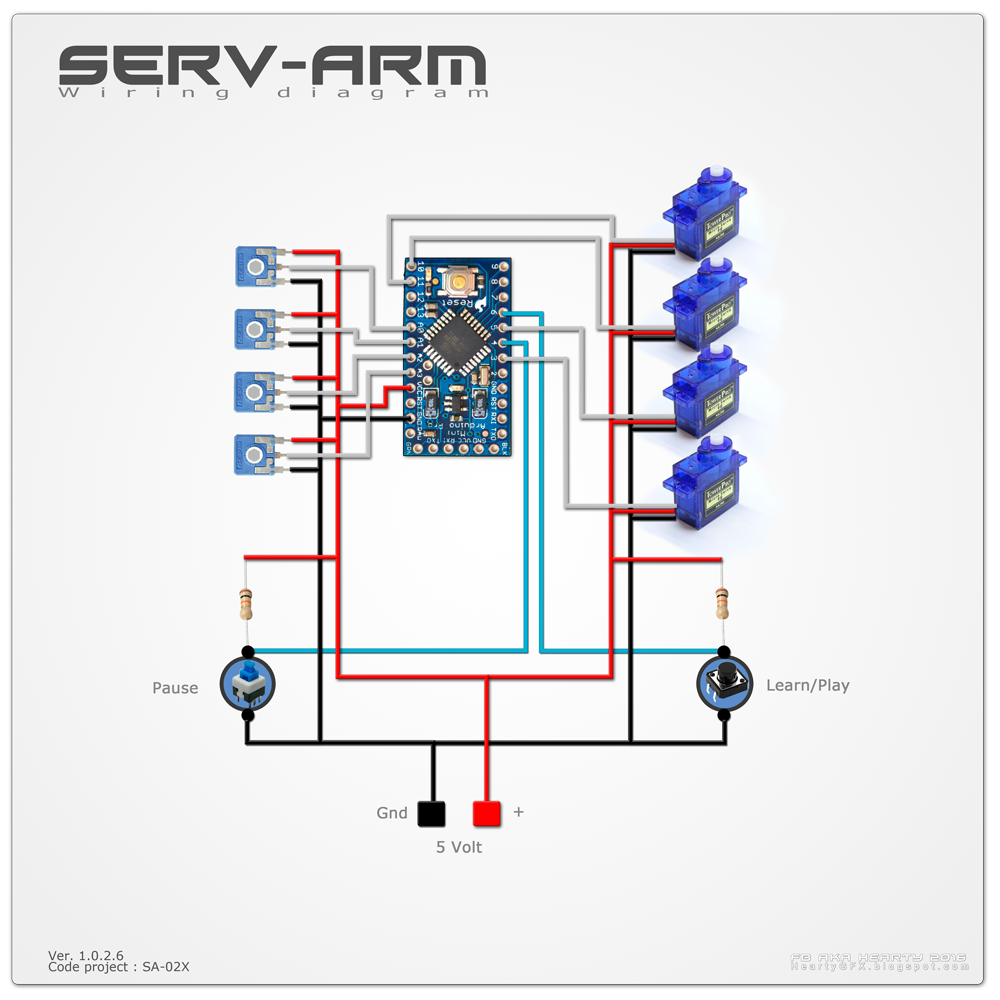
Электронная часть
Смотрите схему подключения электроники. Трудностей возникнуть не должно.
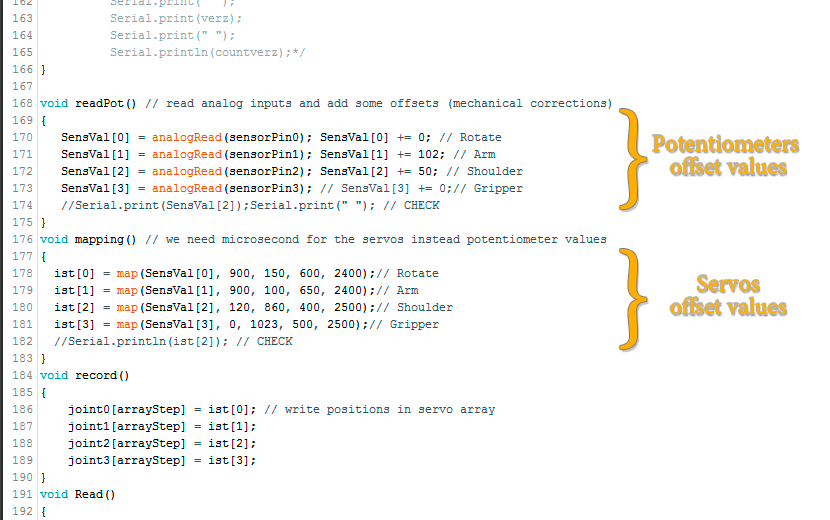
Прошивка
Для того, чтобы использовать Серворуку, вы можете написать свою собственную прошивку или использовать готовую (тут). В готовой прошивке значения настроены настроены для 25K потенциометров.
Если вы используете 20K потенциометр, вам нужно будет изменить некоторые значения смещения.
Если вы используете Arduino Mini Pro (без USB), вам будет необходим внешний TTL-USB конвертер, например такой как FTDI232 для загрузки встроенного программного обеспечения. Проще испольщовать можели Arduino в которых этот контроллер встроен (Nano или UNO).
Инструкция по использованию
Нажимная кнопка используется для обучения и воспроизведения записанного порядка действий:
- После поворота контроллера, нажмите кнопку и позиция будет записана.
- Чтобы воспроизвести последовательность, нажмите кнопку дважды.
Вторая кнопка
- Это кнопка переключает между режимами паузы и воспроизведением записанных действий.
В режиме воспроизведения поворот подстроечных сопротивлений будет увеличивать скорость воспроизведения.
Здравствуйте . а скетча нет . а где взять ?