
Яйцебот Сфер-О-Бот (eggbot MOD)






Яйцебот Сфер-O-бот (Sphere-O-Bot, eggbot MOD) является проектом с открытыми исходниками железа и программного обеспечения. Проект является модификацией знаменитого EggBot от компании Evil Mad Scientist, которые делают очень хороших роботов.
Список деталей
Для печати на 3Д Принтере:
1 x Держатель пружины
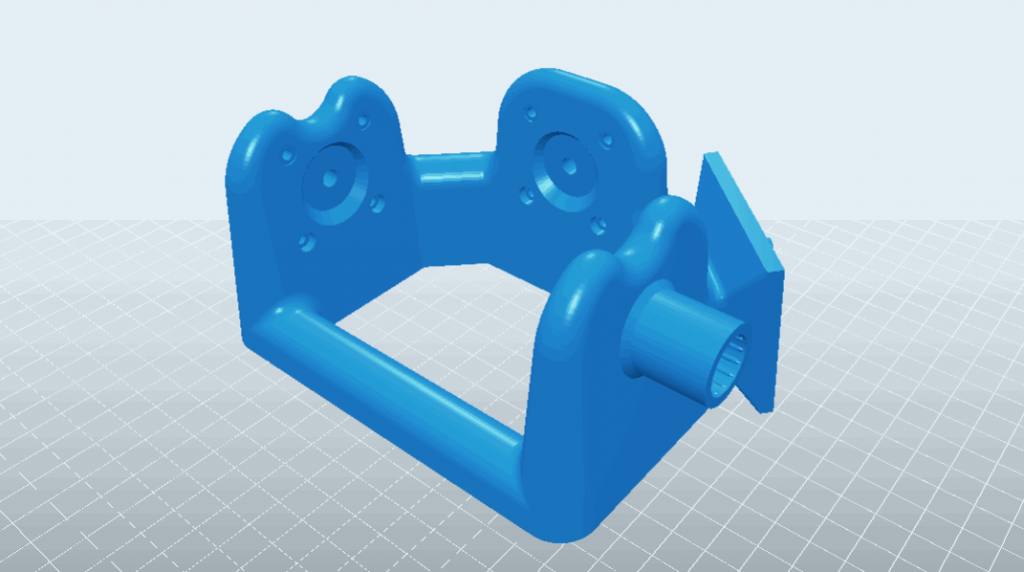
1 x Рама (с поддержкой)
1 x Поддержка яйца вариант 1 или вариант 2
1 x Держатель маркера
2 x Осевая поддержка
1 x Вертикальная фаланга вариант 1 или вариант 2
1 x Разделитель
Электроника и другие детали:
2 x 623zz подшипник тут
1 x Шпилька (3 мм диаметр, 80 мм длина)
1 x Пружина (4,5 мм диаметр, 10 мм длина) тут
2 x Шаговый двигатель NEMA 17 (40 мм длина) тут
1 x Серводвигатель SG90 тут
1 x Arduino Leonardo тут и плату автора xjjRobots Brain Shield.
Вместо платы автора можно использовать CNC Shield v3 тут и Arduino UNO тут этот вариант дешевле и доступней
2 x Драйвер шагового двигателя A4988 тут
1 x Блок питания 12v/2A тут
11 x Болт M3x6 тут
4 x Болт M3x12 тут
4 x Гайка M3 тут
2 x Присоска 20 мм тут
1 x Барашковая гайка M3 тут
Инструкция по сборке
1. Общая схема сборки
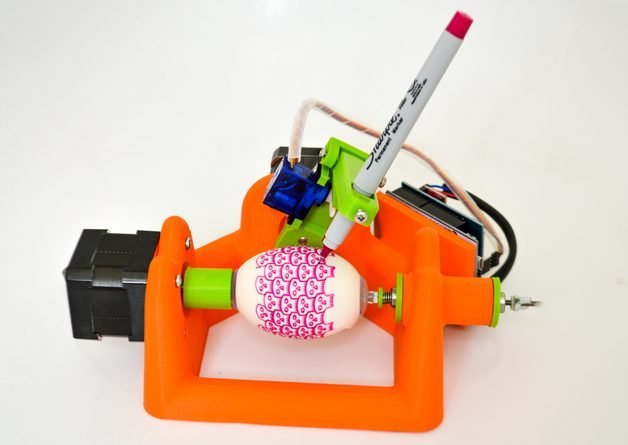
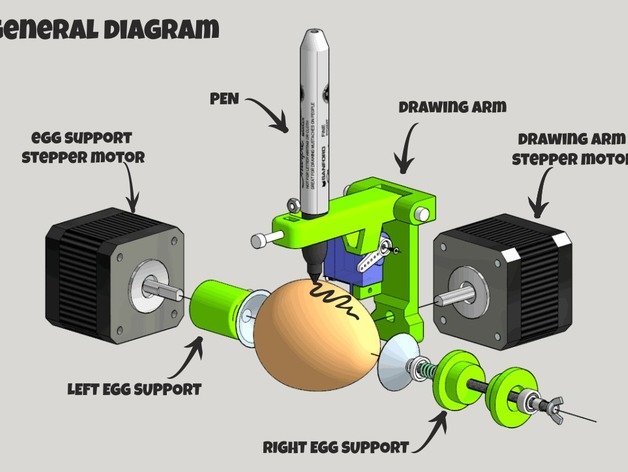
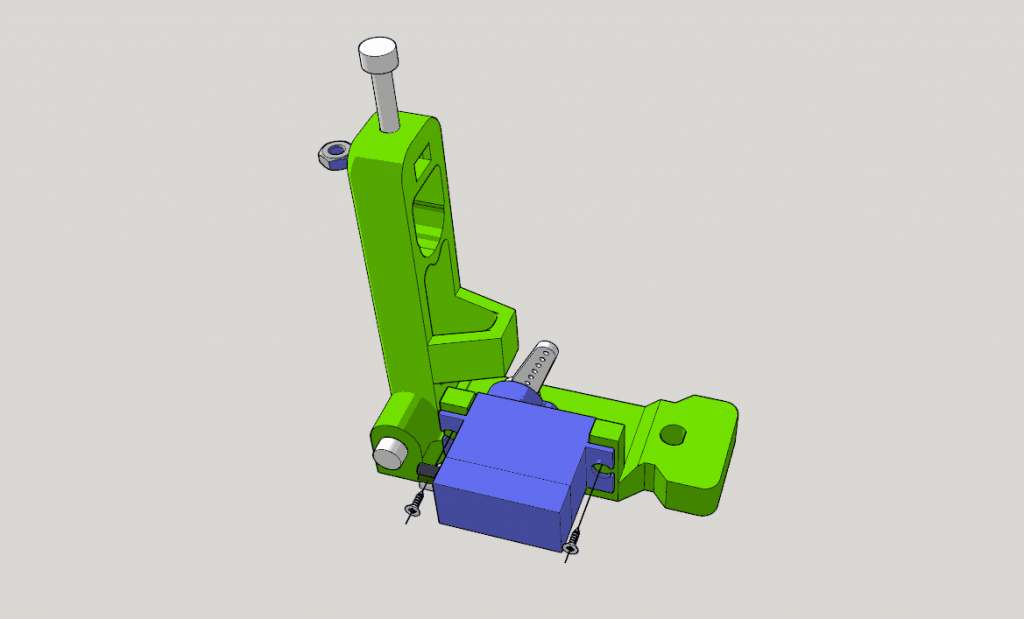
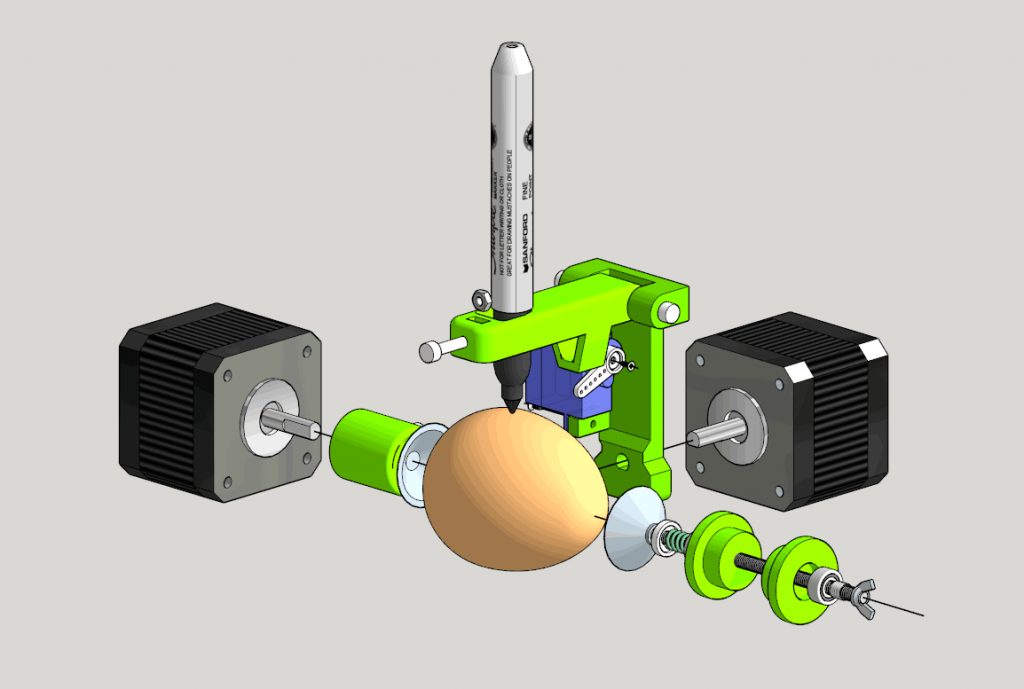
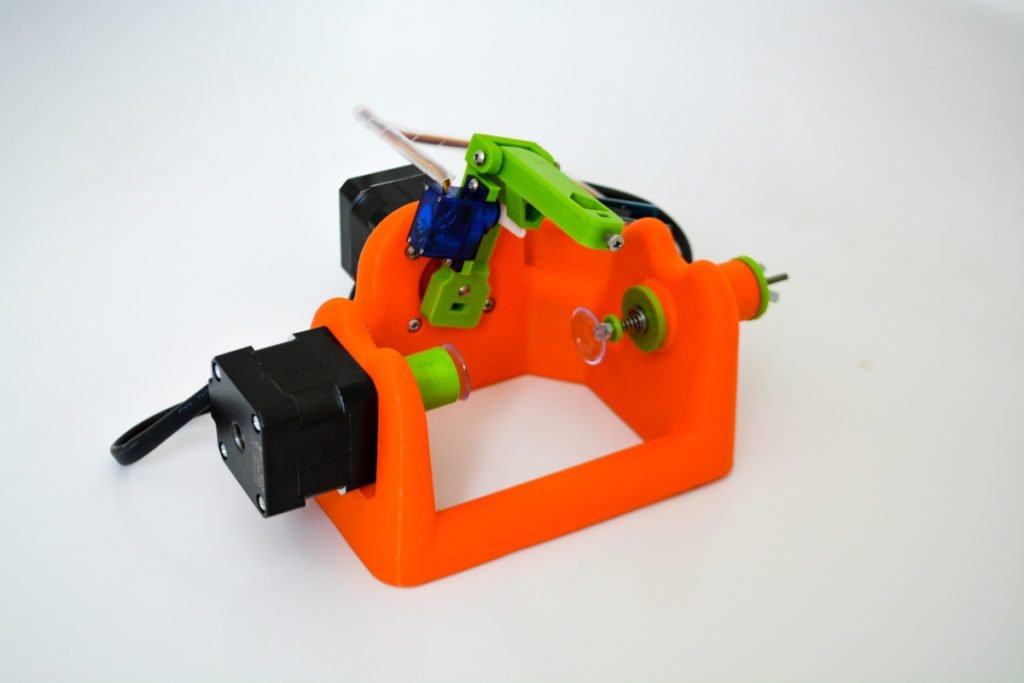
Этот яйцебот имеет держатель маркера, который поворачивается шаговым двигателем. Другой шаговый двигатель отвечает за поворот яйца или другого шарообразного объекта вокруг своей оси. Чтобы яйцо было надежно закреплено используются присоски. Одна присоска закреплена на шаговом двигателе поддержки яйца. Другая присоска закреплена на шпильке с другой стороны. Небольшая пружина будет толкать присоску и надежно удерживать яйцо в то время, когда на нем рисует маркер. Чтобы маркер мог подниматься и опускаться в нужных местах используется серводвигатель SG90. Сама рама, на которой крепятся все детали показана ниже.
Общая схема сборки яйцебота
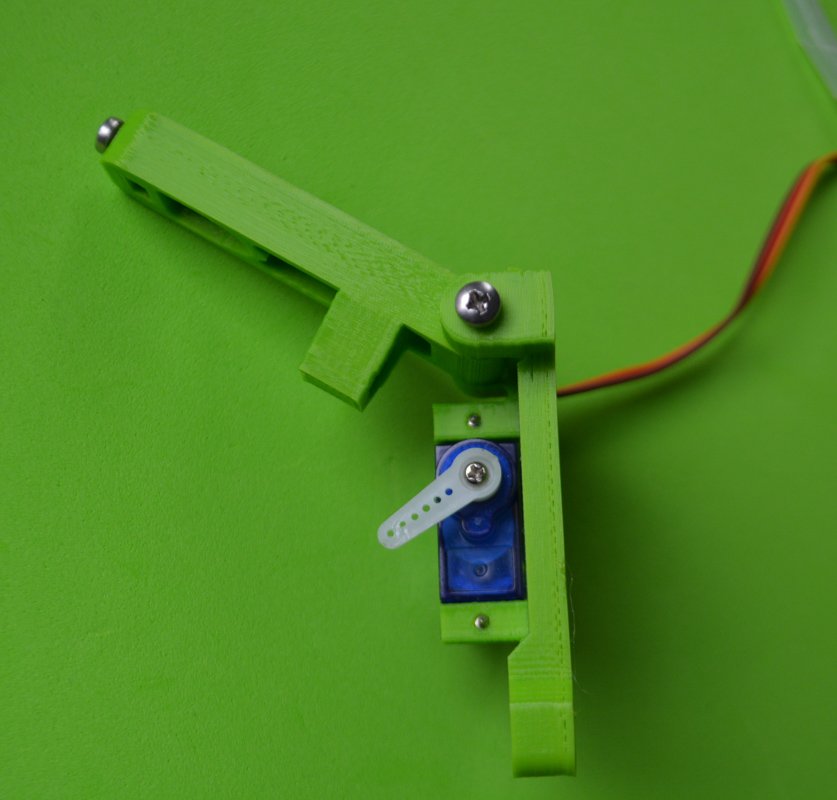
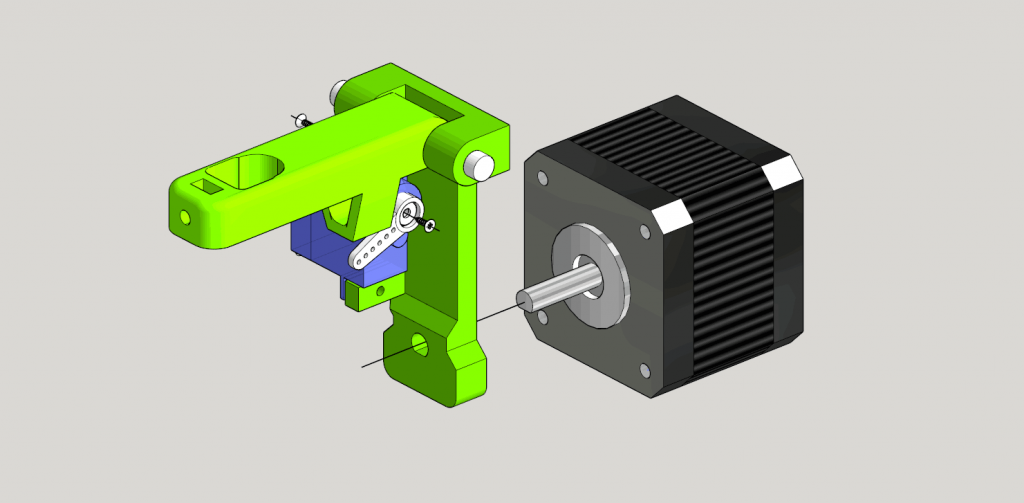
2. Сборка держателя маркера и левой поддержки яйца
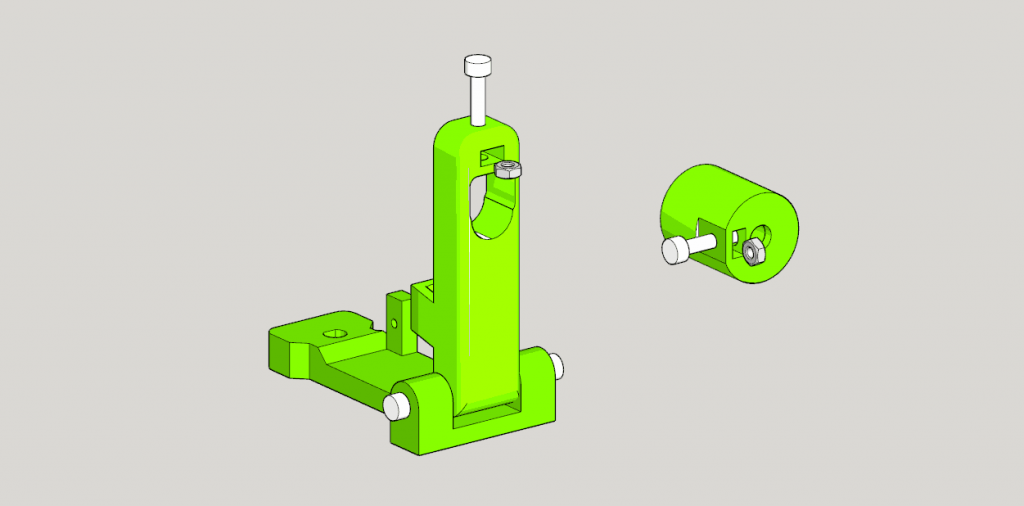
Используя два винта закрепите серодвигатель SG90 к детали, как показано на картинке выше.
Поместите гайку М3 внутри отверстия и вкрутите в нее один 16 мм болт. Сделайте то же самое для держателя держателя яйца. Петля для сустава держателя маркера делается при помощи 2-х 16мм болтов М3. Эта петля должна свободно вращаться после того, как эти два болта будут завинчены.
Ниже приведены 3 фотографии держателя маркера в уже собранном виде.


Закрепите одну из присосок внутри D образного отверстия в левой поддержке яйца, как показано ниже

3. Крепление шаговых двигателей и сборка оси Х

Закрепите оба шаговых двигателей к основной раме с помощью 8 х 16мм M3 болтов. Это довольно просто.
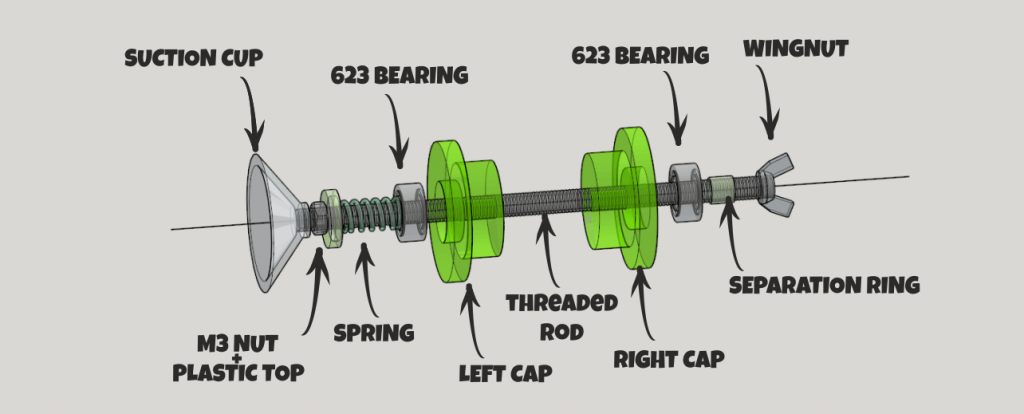
Вверху: Схема сборки оси X (шпилька длиной 80 мм, М3). Поместите все элементы, как показано на рисунке выше.
Правильный порядок сборки:
1. Присоска — 2. M3 гайка — 3. Держатель пружины — 4. Пружина — 5. 623 подшипник (встраивается в осевую поддержку) — 6. Левая поддержка — 7. Главная рама (нет на картинке) — 8. Правая поддержка — 9. 623 подшипник (встраивается в осевую поддержку) — 10. Разделитель — 11. Барашковый винт.
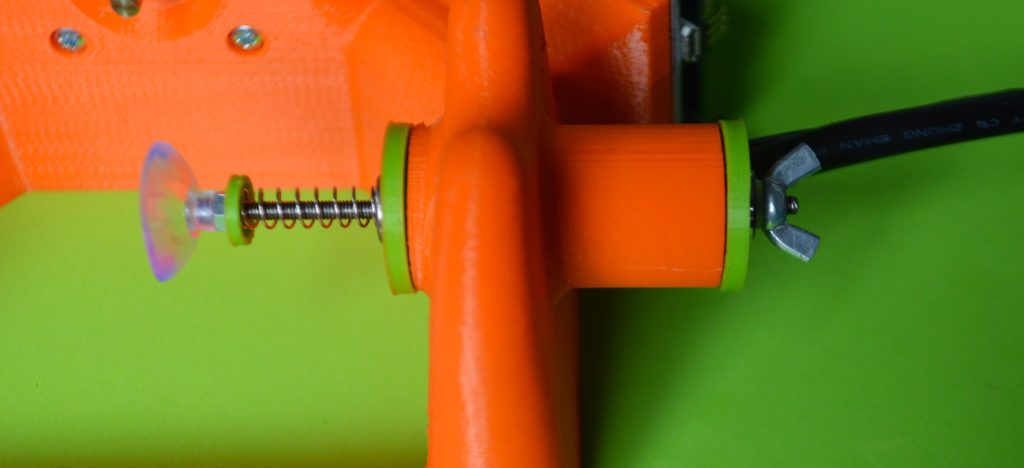
После сборки ось X должна выглядеть так:
4. Разместите все в нужном месте
Выше: Вставьте собранный держатель маркера в ось шагового мотора. Помните, что на рисунке не показана рама, в которой шаговый мотор закреплен. Надежно закрепите.

Установите левую поддержку яйца в ось шагового двигателя.

Выше: так должен выглядеть яйцебот сверху теперь.
Еще раз проверьте по схеме выше, что вы установили все правильно. маркер и яйцо есть на картинке только для примера, вставлять их пока не нужно.
ПРИМЕЧАНИЕ: держатель маркера требует некой калибровки. В процессе калибровки нужно будет еще раз установить угол. Это делается очень легко.
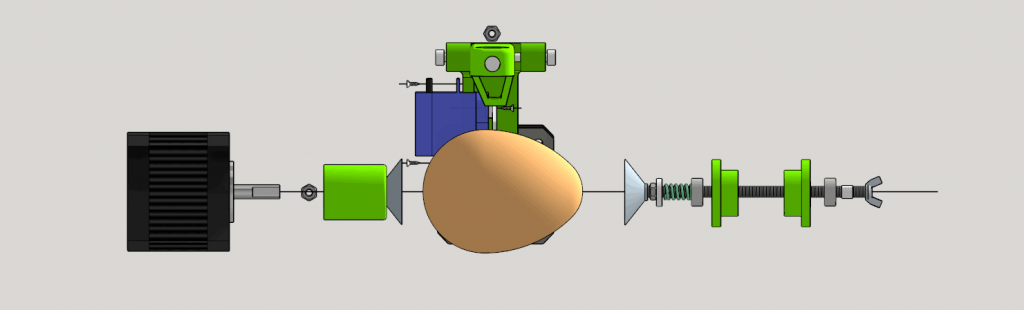
Выше. Общая схема вид спереди. Опять же рама не показана.
5. Электроника + кабели. Как подключить все.
Почти все готово. Возьмите JJrobots Brain Shield (или CNC Shield), Arduino Leonardo и 2 драйвера шагового двигателя. Соедините все, как показано на рисунке ниже. Дважды проверьте ориентацию драйверов шагового двигателя иначе при включении они сгорят.
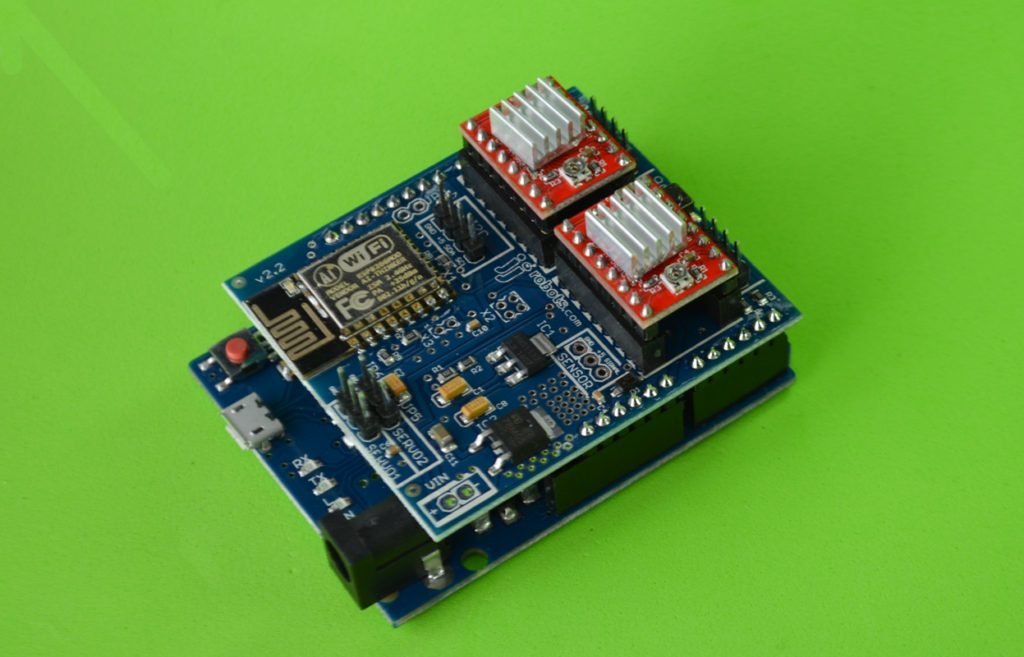
Закрепите электронику на задней стороне рамы яйцебота с помощью 6мм болтов М3 (2-х достаточно).
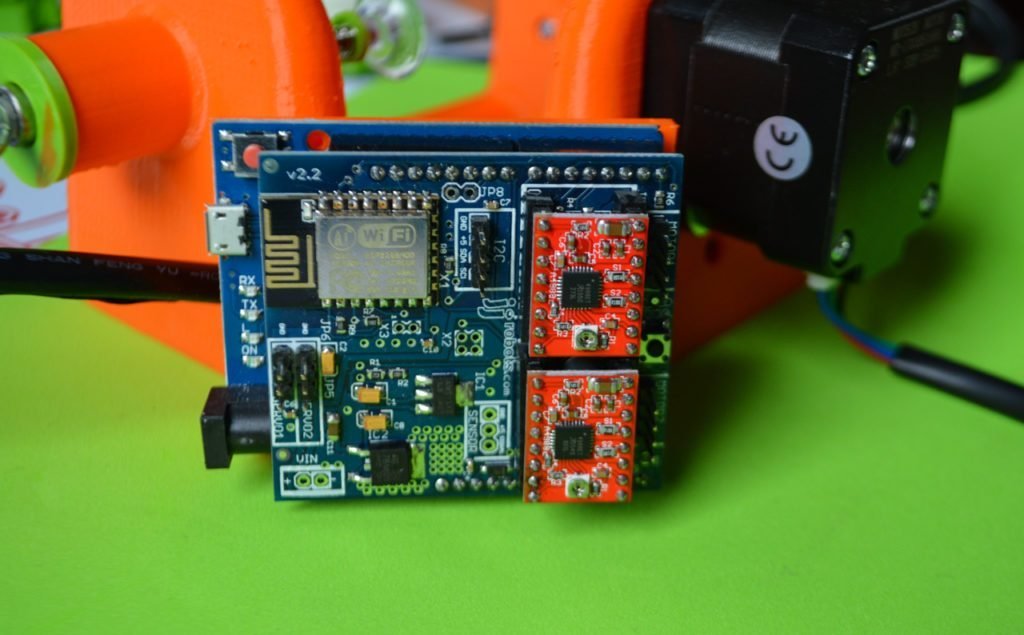
Внизу: вид сверху уже закрепленной электроники.

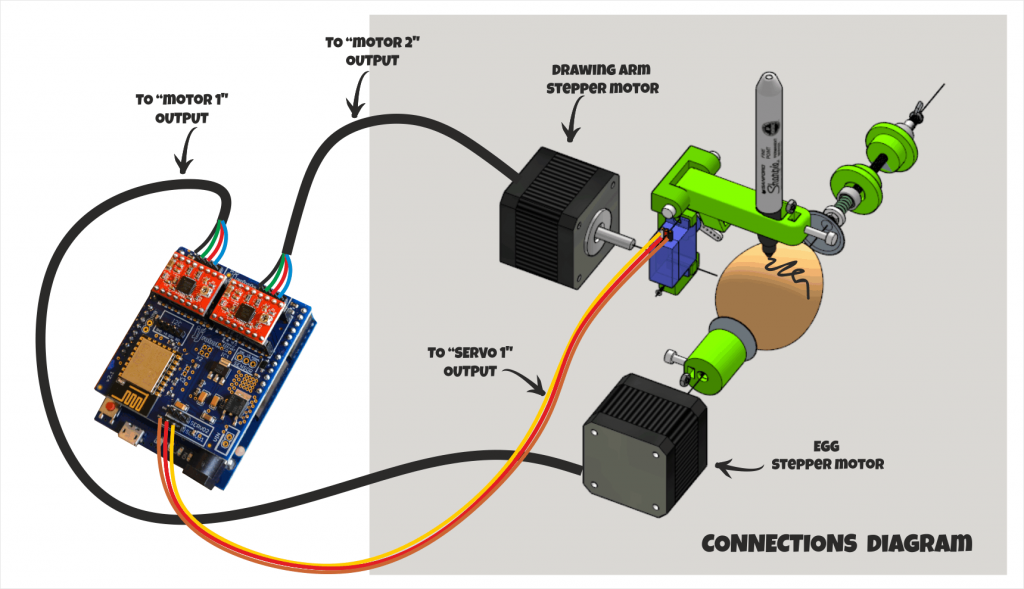
Подключите кабели, как показано выше. Проверьте полярность ДВАЖДЫ!
6. Заливка прошивки
Заливка прошивки на Arduino Leonardo осуществляется с помощью Arduino IDE (v 1.6.5). Это очень просто:
1) Загрузите Arduino IDE (v 1.6.5) отсюда: www.arduino.cc/en/Main/Software. И установите его на свой компьютер.
2) Подключите плату Arduino Leonardo кабелем к USB порту своего компьютера.
3) Запустите Arduino IDE. Выберите плату Arduino Leonardo и COM порт в меню «tools->board»…
4) Откройте и загрузите в плату прошивку яйцебота. Прошивка тут загрузите ее и распакуйте все файлы в папку «Ejjduino_ARDUINO».
Инструкция по использованию
Программное обеспечение
Для черчения Яйцеботом на яйцах вам понадобится бесплатный векторный редактор Inkscape (тут) и расширение для него Eggbot Control (тут).
Расширение Eggbot Control для Inkscape является инструментом, который вы будете использовать, для проверки и выравнивания Яйцебота, а также передачи ваших рисунков на яйца.
Сначала вам нужно установить Inkscape. После того, как Inkscape работает, в меню Extensions будет подменю Eggbot. Если вы не видите подменю Eggbot, значит вы еще не установили расширение.
В подменю Eggbot есть несколько пунктов, которые выполняют различные задачи. Наиболее важным пунктом является Eggbot Control…, который запускает расширение, непосредственно взаимодействующее с Яйцеботом. Диалог Eggbot Control имеет восемь вкладок. На первых двух вкладках «Plot» и «Setup» расположены основные элементы управления и настройки Яйцебота. На остальных шести вкладках расположено множество дополнительных функций.
Plot — Эта вкладка используется для передачи рисунка из Inkscape к Яйцеботу.
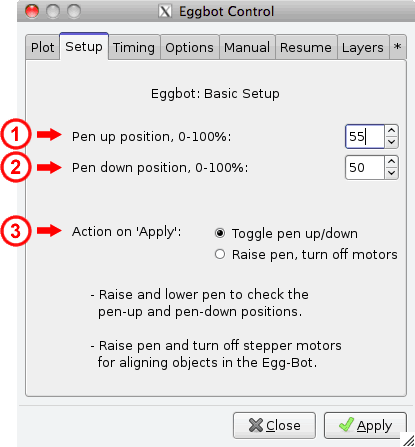
Setup — Используйте эту вкладку, чтобы откалибровать верхнюю и нижнюю границу маркера, или войти в режим выравнивания (где двигатели выключены, и маркер убран вверх).
Timing — Эта вкладка позволит вам изменить некоторые значения временных параметров для действий Яйцебота.
Options — Эта вкладка позволит вам настроить некоторые из поведений Яйцебота.
Manual — Эта вкладка позволит вам управлять вручную Яйцеботом (вращение двигателей, поднимание / опускание пера и т.д.)
Resume — На этой вкладке описывается, как сделать паузу и как возобновить черчение.
Layers — Эта вкладка даст вам возможность для построения многослойных рисунков (для многоцветных).
`*` — Эта вкладка отображает информацию о версии расширения Eggbot и иногда примечания к выпуску.
Подготовка Яйцебота для черчения на яйце
Как только вы все соберете и загрузите, то сразу захотите поставить маркер в держатель, закрепить яйцо и начать рисовать. Это отличный способ все испортить и разбить яйцо. Чтобы этого не случилось вам нужно закрепить яйцо так, чтобы оно равномерно вращалось и кончик маркера имел бы нормальный контакт со всей площадью яйца во время вращения.
Чтобы сделать это, выполните следующие действия:
1. Выполните калибровку позиции маркера вверх/вниз.
- Это является частью первоначальной настройки, вам не придется делать это каждый раз.
- На вкладке Setup, выберите «Toggle pen up/down», как указано в (3) выше. Затем нажмите кнопку Apply несколько раз. Серводвигатель должен двигаться вперед и назад между двумя различными позициями.
Если серводвигатель не двигается, проверьте, что он правильно подключен к Arduino и что само Arduino подключено к внешнему питание, а кабель USB подключен к компьютеру.
После этого вам нужно подогнать два процентных значения ((1) и (2), отмеченных выше) для маркера, соответствующих положению вверх и вниз таким образом, чтобы:
- Держатель маркера был примерно горизонтально, или чуть ниже в положении «вниз»
- Держатель маркера был немного выше горизонтальной плоскости, в положении «вверх»
Как правило, вам нужно добиться, около 5 мм общего хода между этими двумя положениями. Этот диапазон может соответствовать лишь нескольким процентам разницы между «вверх» и «вниз» позиций.
2. Настройте моторы.
На вкладке Setup, выберите «Raise pen, turn off motors», а затем нажмите кнопку Apply. Это позволит разблокировать моторы и их можно свободно вращать в любом направлении, чтобы правильно закрепить маркер над яйцом.
Крепление яйца в Яйцеботе
1. Выньте маркер (если он уже вставлен) из держателя.
2. Вымойте яйцо, на грязном или жирном маркер может плохо рисовать. Особенно это важно для очень тонких маркеров
3. Оттяните поршень оси X, подставьте яйцо и осторожно отпуская поршень закрепите яйцо слева и справа присосками. Скорректируйте положение, если яйцо оказалось не по центру.
4. Поместите ручку в держатель и затяните винт, чтобы зафиксировать положение пера точно на яйце.
Подготовка чертежа
Лучше всего начать с документом размера 800 пикселей в высоту на 3200 пикселей в ширину. Для начала вы можете попробовать один из готовых примеров (тут). Сфера-O-бот рисует Path — сплошные линии — не растровые изображения. Определенные типы объектов автоматически рассматриваются как Path, например, круги и прямоугольники. Другие типы объектов, которые сделаны из линий, такие как, например, контурный текст, должны быть преобразованы в Path (Path menu > Object to path) перед черчением.
Печать на яйце
1. На вкладке Manual, выберите Enable Motors, затем нажмите Apply. Затем выберите Raise Pen и снова нажмите Apply.
2. Поместите маркер в держатель.
3. На вкладке Plot, нажмите Apply и Яйцебот начнет чертить.
Автор проекта: jjrobots
Рама для этого проекта была разработана: Attila Nagy.
С CNC Shield V3 нужно использовать именно Arduino UNO с Arduino Leonardo ничего не выйдет !
Расширение Eggbot Control для Inkscape будет подключаться только к фирменной плате. На форуме был задан вопрос по ошибке подключения. Ответ был — расширение работает только с фирменной платой, сторонние не поддерживаются.
в файле ebb_serial.py делаете вот такой финт и всё работает
if comports:
comPortsList = list(comports())
EBBport = None
for port in comPortsList:
if port[1].startswith(«EiBotBoard») or port[1].startswith(«Arduino») or port[1].startswith(«USB»):
EBBport = port[0] #Success; EBB found by name match.
break #stop searching— we are done.
У кого то компилируется прошивка? у меня кучу ошибок выдает.
А есть схема подключения CNC Shield v3 и Arduino UNO
Подскажите, хочу распечатать нужные детали для сборки, но люди которые могут отпечатать спрашивают каким пластиком печатать и с каким качеством. А еще интересно в описании есть элементы Вариант 1 и вариант 2 что предпочтительнее выбрать ? Заранее спасибо.
Печатал PLA пластиком ну можно использовать и ABS (усадка больше).
Качество будет зависеть от принтера на котором они будут вам печатать детали.
Прочность и вес от заполнения детали печатал при 20%.
Вариант 1 и 2 это просто элемент поддержки яйца открой файл и сразу станет понятно 🙂 для рисования и просмотра пользуюсь бесплатным Freecad.
Что то смотрел 2 варианта или я еще в 3D не привык но разницы не увидел, разве что грани в одной видно в другой нет.
И по итогу что советуете для сборки Arduino Leonardo или Arduino UNO и CNC — последние есть в наличии.
Можно и Arduino UNO ну с ней будет больше проблем с настройкой прошивок.
Если мало опыта очень советую купить готовый комплект (экономия времени и денег) и собрать этот http://3dhobbies.ru/eggbot-egg-painter-mini-diy/
Он очень прост в сборке и настройке!
Заказывал с доставкой из России приехал за 7 дней!
Можно показать схему подключения CNC Shield v3 с драйверами и Arduino UNO.
Спасибо, буду пробовать на выходных.
Доброго времени суток, где находится этот файл ebb_serial?
А кто прогу написал? поделитесь пожалуйста под UNO
Уведомление: seo services india blog
Уведомление: UFA888 เว็บแทงบอลสดยูฟ่าเบท
Уведомление: sextoy
Уведомление: แฟนเช่า
Уведомление: pg168
Уведомление: ตู้ล่าม
Уведомление: Debelov
Уведомление: buy lsd UK
Уведомление: clothing manufacturer
Уведомление: ทดลองเล่นสล็อต PG SLOT
Уведомление: จำหน่าย พัดลมอุตสาหกรรม
Уведомление: ทำไมถึงต้องเล่น สล็อต789
Уведомление: Debelov
Уведомление: ตรวจสอบสลิปโอนเงิน
Уведомление: 123bet เข้าสู่ระบบ
Уведомление: สบาย168
Уведомление: เน็ตบ้าน ais
Уведомление: แทงหวย
Уведомление: รับจด อย
Уведомление: https://volcanoonline.net/
Уведомление: หนังใหม่ออนไลน์
Уведомление: sp2
Уведомление: เว็บตรงฝากถอนง่าย
Уведомление: psilocybin chocolate
Уведомление: bookofra.uk/book-of-ra-deluxe/
Уведомление: เอเจนซี่ศัลยกรรมจีน
Уведомление: cheap enclomiphene price canada
Уведомление: สล็อตเกาหลี
Уведомление: carplusmotors
Уведомление: Chicken Road
Уведомление: av
Уведомление: แอพเช็คสลิปโอนเงิน
Уведомление: fear of god essentials
Уведомление: โคมไฟ
Уведомление: mk8
Уведомление: arctic starburst
Уведомление: best color correction salon in miami
Уведомление: วางระบบเน็ตเวิร์ค ระยอง
Уведомление: ขายพาเลทพลาสติก
Уведомление: Mo's StoneX
Уведомление: หนังสั้น
Уведомление: จัดหาแม่บ้าน
Уведомление: baja real estate
Уведомление: แทงหวย24