
4xiDraw Собираем перьевой плоттер на Arduino Часть 2
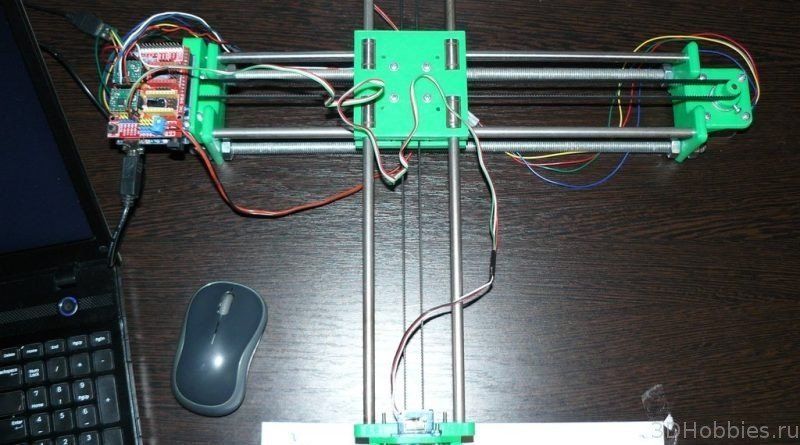
4xiDraw почти готов!
В этой части продолжим сборку и настройку механической части плоттера. Подключим электронику и настраиваем ток драйверов A4988
Для сборки «4xiDraw» использовали:
2 шаговых двигателя nema 17 тут
4 8mm Гладкие стержни 2 шт. 400mm и 2 шт. 320mm (куплено в строительном магазине)
2 M10 Резьбовые стержни 400mm (куплено в строительном магазине)
8 LM8UU Линейные подшипники тут
2 GT2 Шкивы тут
10 F623ZZ подшипники тут
1 micro servo SG90 (плюс удлинитель кабеля 250 мм) тут
1 Arduino UNO тут
1 CNCshield тут
2 x Драйвер шагового двигателя A4988 тут
1 GT2 Ремень 1.4 метра тут
8 M10 гайки (куплено в строительном магазине)
8 30mm M3 Винты с гайками (куплено в строительном магазине)
8 6mm M3 Винты (куплено в строительном магазине)
4 16mm M3 Винты с гайками (куплено в строительном магазине)
4 M3 шайбы (куплено в строительном магазине)
2 15mm M3 винты (куплено в строительном магазине)
1 12V 2A блок питания (куплено в магазине электротоваров)
1 USB кабель (в любом магазине электроники)
1 Перьевая ручка ну или просто маркер 🙂
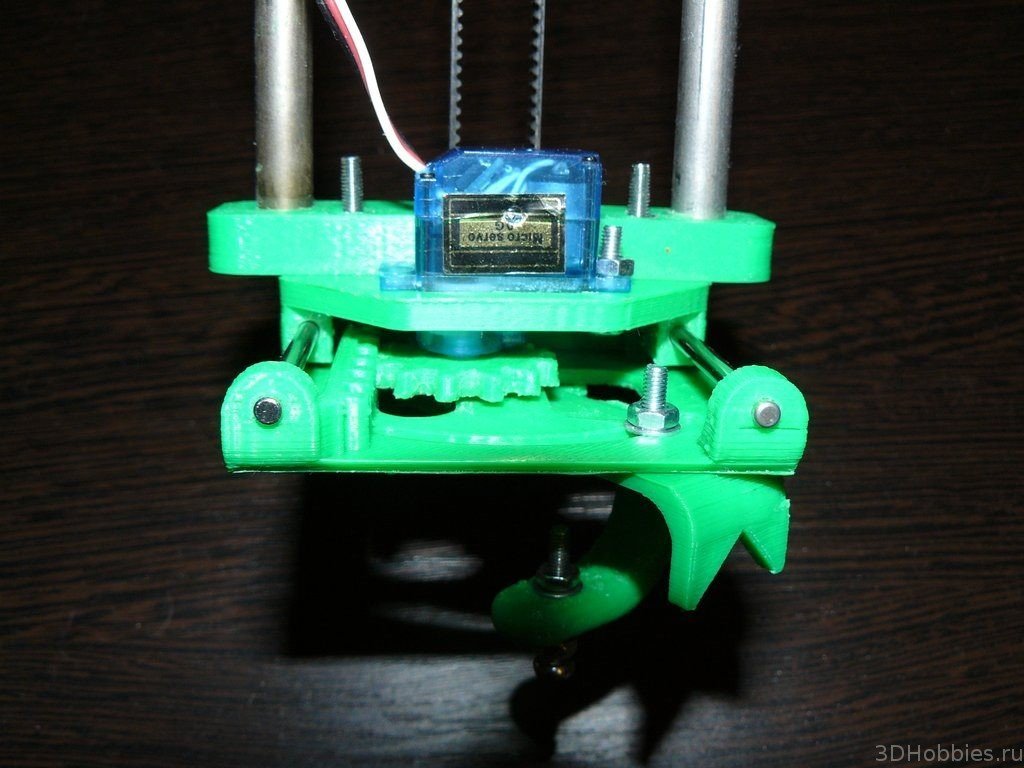
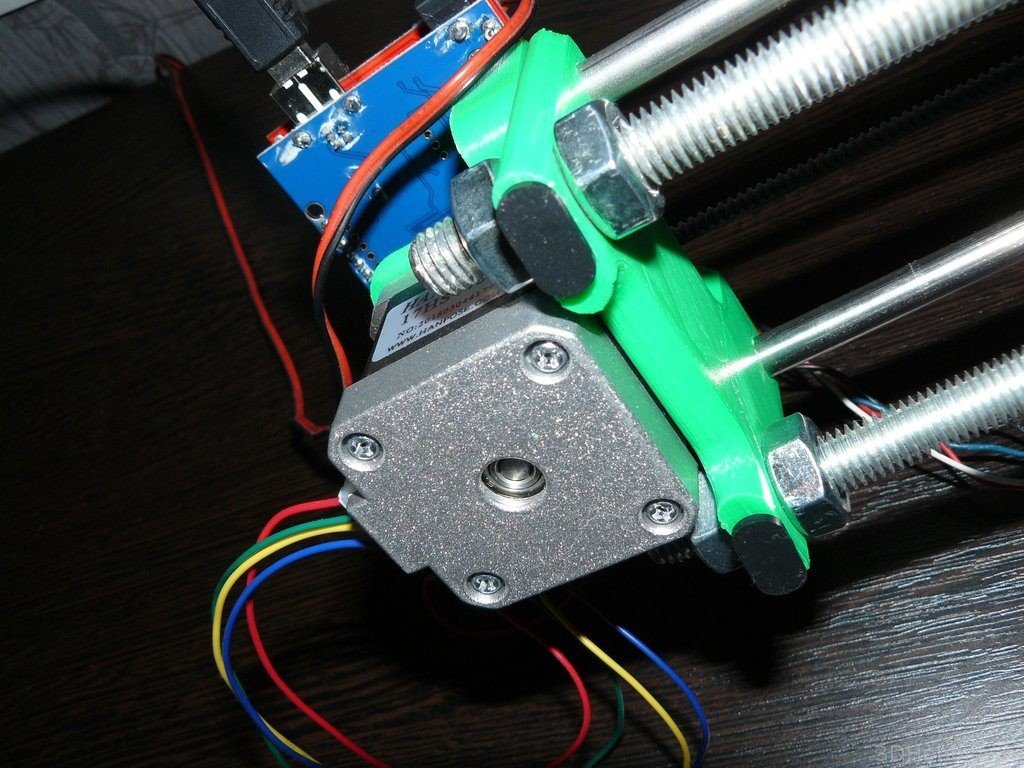
Было решено использовать немного модернизированную конструкцию каретки с шестернёй
STL carriage_gear, engrenagem
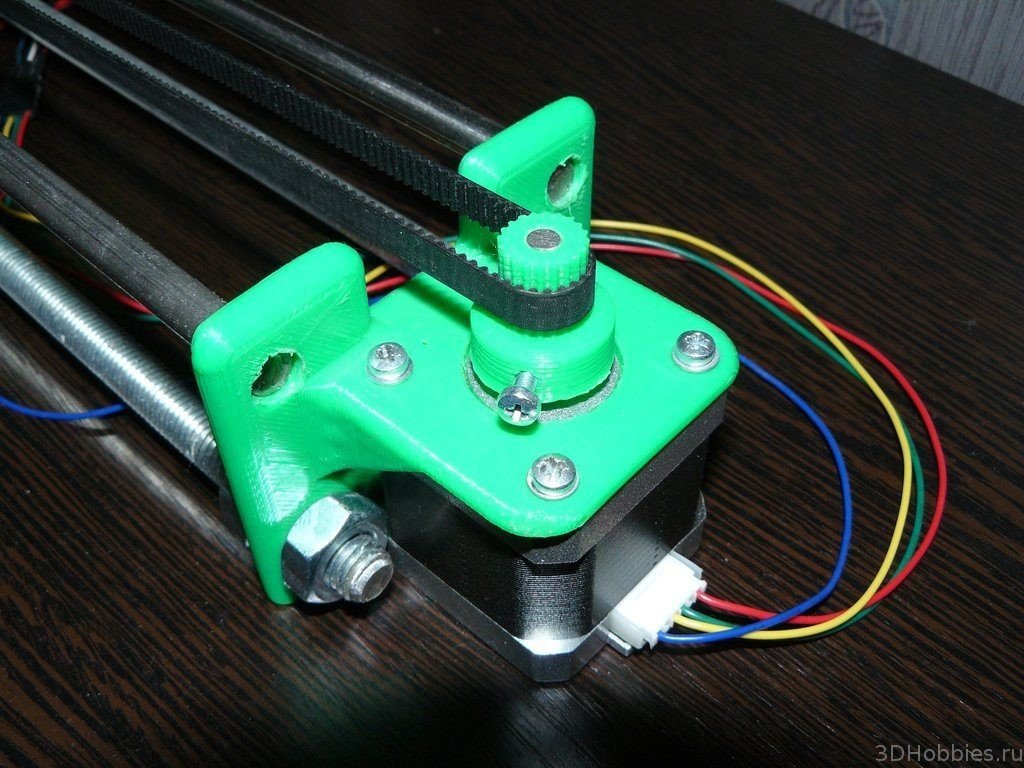
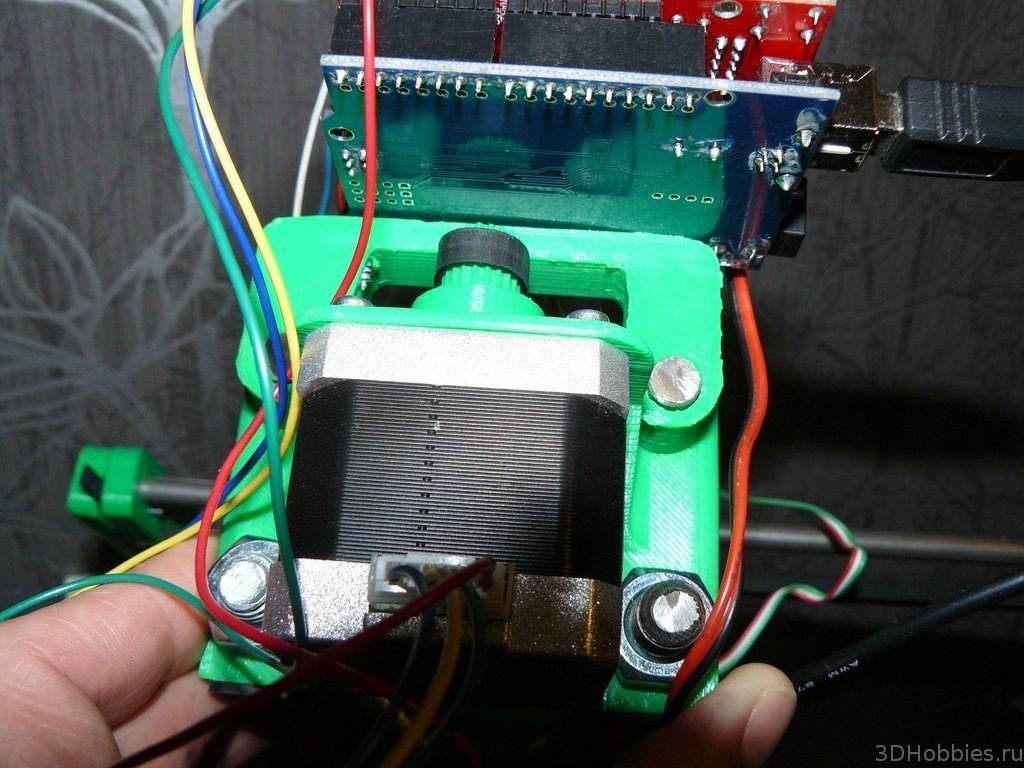
Моторы Nema 17HS4401 отлично подошли для нашего проекта 4xiDraw
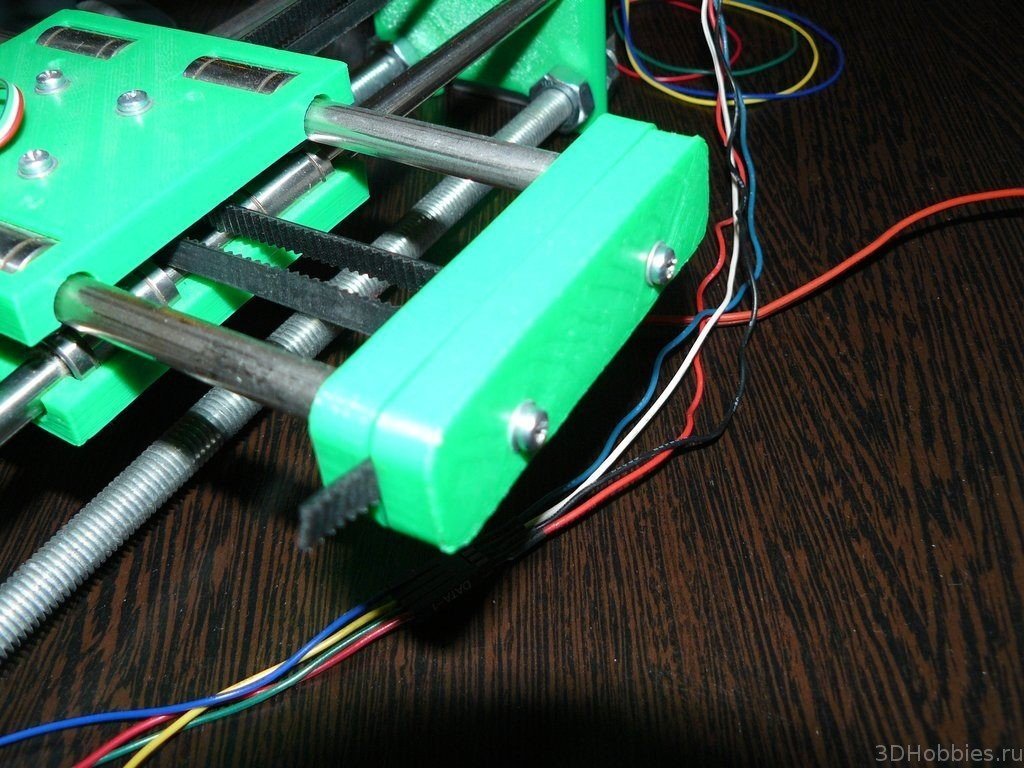
Регулируем натяжение ремня и затягиваем болты
Можно использовать печатные шестерни (20 зубьев)
STLка шестерни для печати
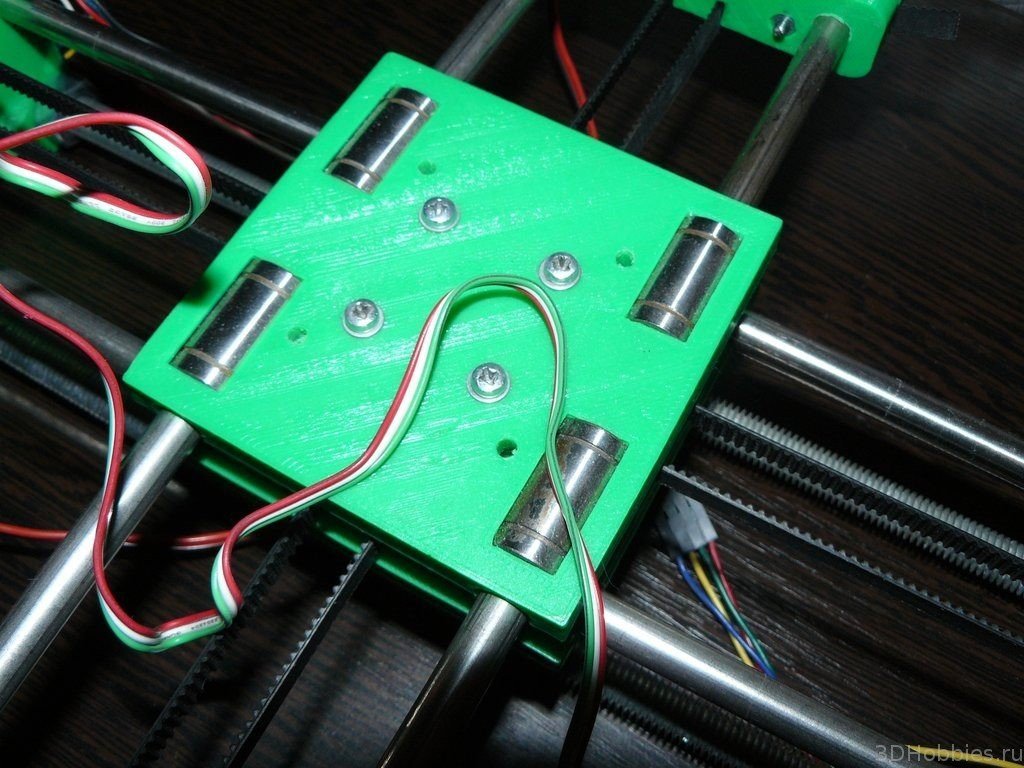
Линейные подшипники LM8UU плотно встали
STLка пришлось немного увеличить по высоте держатель для Arduino
Резиновые накладки на ножки уменьшат немного шум и вибрации при работе плоттера
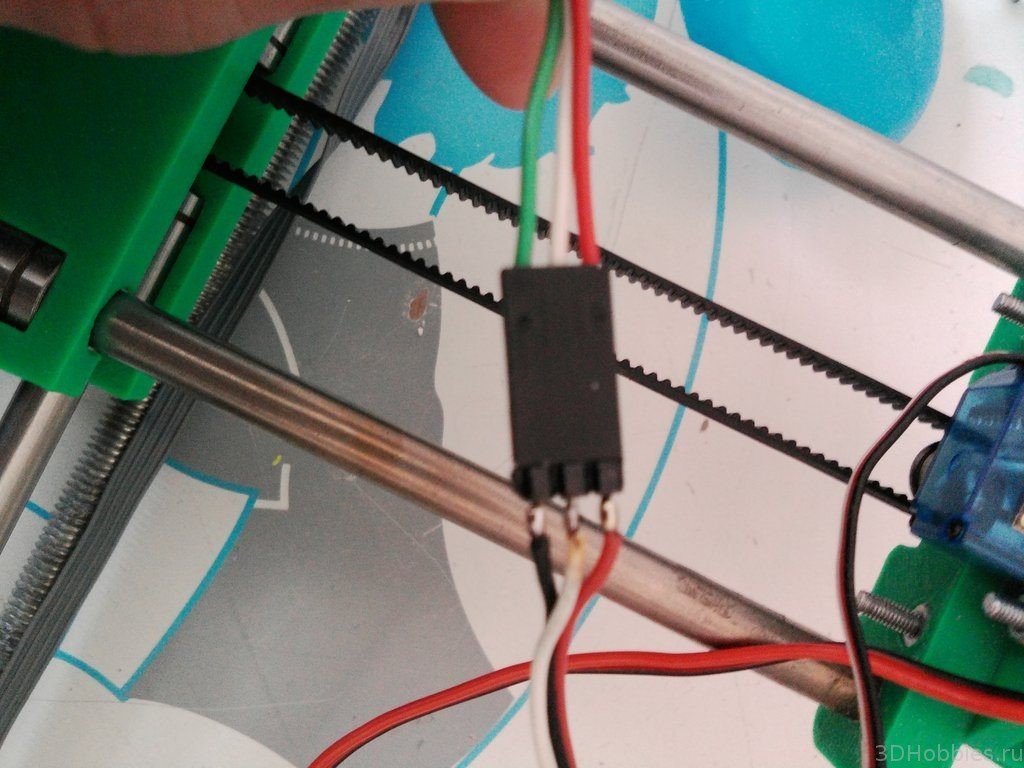
Подключаем servo SG90 нам пришлось использовать удлинитель так как провода от сервопривода очень короткие
сервопривод — удлинитель
красный — красный
белый — белый
чёрный — зелёный
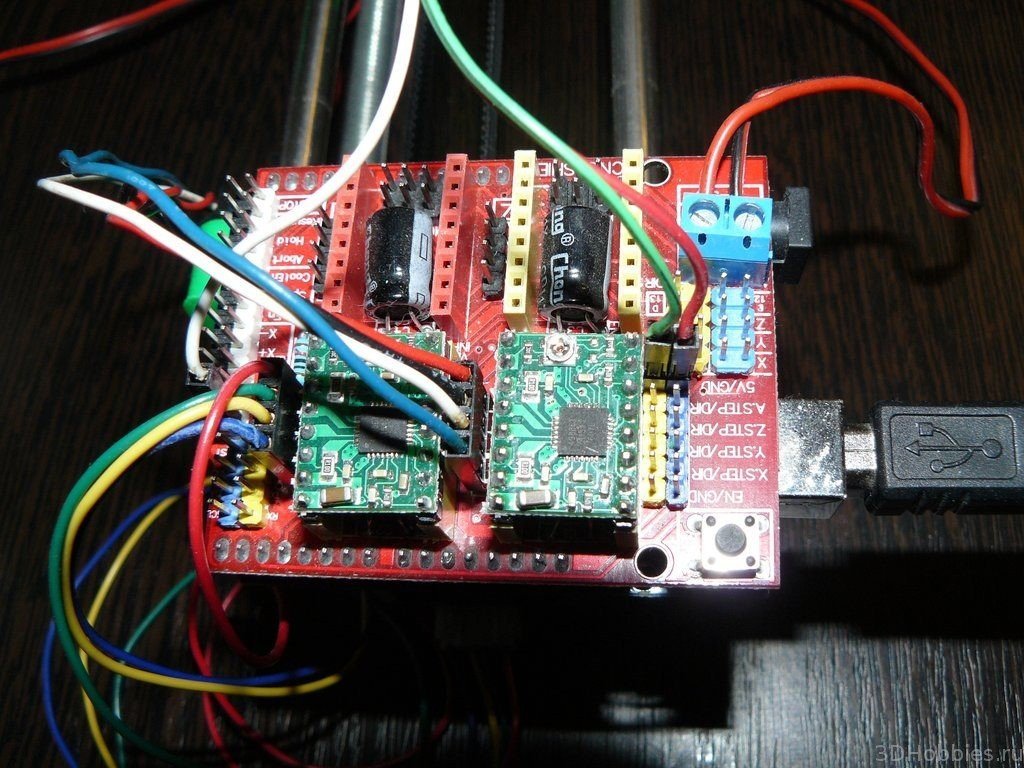
При установке драйверов шагового двигателя A4988 обратите внимание на правильность установки!!! (иначе нужно будет покупать новые драйвера)
Далее будем настраивать рабочий ток драйверов A4988 для каждого шагового двигателя. Это можно сделать двумя способами:
1. Подключить двигатель в полношаговом режиме и замерить ток на одной обмотки. Он должен быть 70% от номинального тока двигателя. Т.е. для 17HS4401 1,7*0,7= 1,19 А
2. Рассчитать значение Vref — напряжение на переменном резисторе расположенном на драйвере А4988.
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
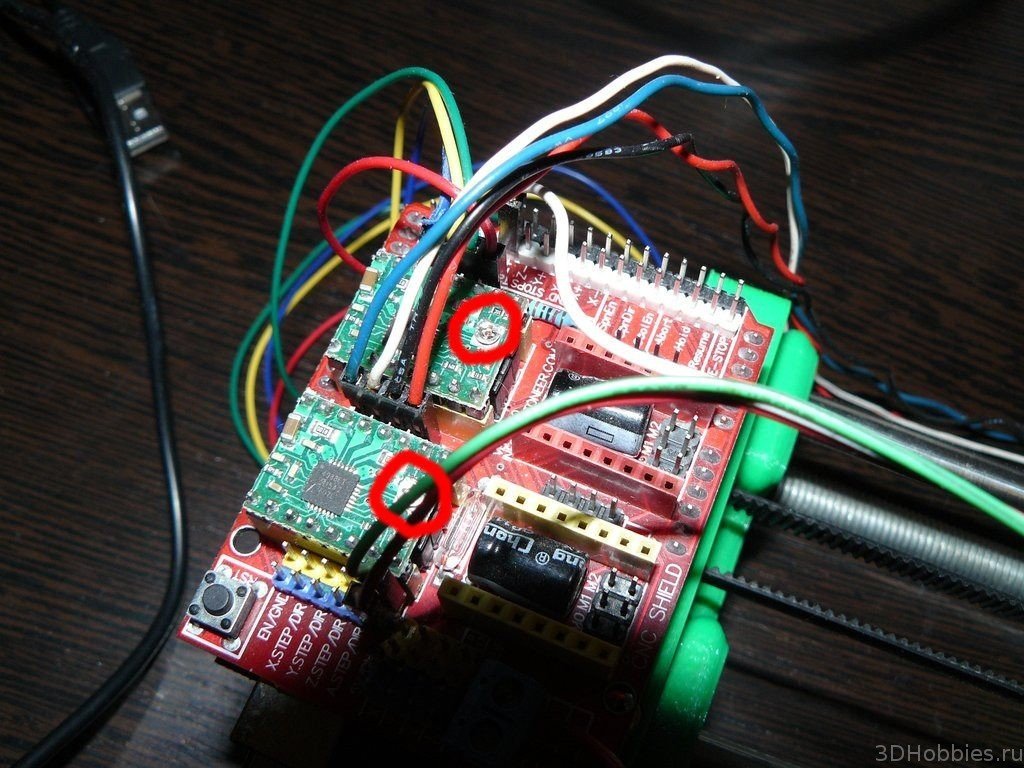
Краткая инструкция настройки тока драйвера шд: Минусовой щуп мультиметра подсоединяем к контакту GND (минус, он общий), плюсовым прикасаемся к корпусу подстроечного резистора на драйвере. Крутим подстроечный резистор отвёрткой и замеряем расчётное напряжение Vref. Таким образом мы выставляем правильный ток для драйвера шагового двигателя. Для каждого вида драйвера своя формула расчета Vref.
На фото подстроечный резистор выделен красным цветом
в 3 заключительной части мы загрузим прошивку и настроим программное обеспечение для рисования