
4xiDraw Собираем перьевой плоттер на Arduino Часть 3. Проба пера!
В этой заключительной части нам нужно загрузить и настроить прошивку а также установить программное обеспечение для рисования Inkscape + Plugin.
Начнём с загружаем прошивки в Arduino
В проекте использовали Arduino UNO и особый вариант программного обеспечения GRB, созданного пользователем robotini. Он позволяет работать с сервоприводом на цифровом выводе 11, используя команды M3 и M5. Таким образом, он может поднимать и опускать ручку на бумаге.
Подробное объяснение установки программного GRBL здесь на Английском языке, пожалуйста, прочитайте его внимательно, так как некоторые люди могут столкнуться с трудностями, поскольку это не типичная программа Arduino.
Проверяем работоспособность подключаемся с помощью Arduino Serial Monitor к плате выбрав скорость 115200 bps и получить приветственное сообщение: grbl 0.9i [‘$’ for help]
Устанавливаем и настраиваем программное обеспечение для рисования
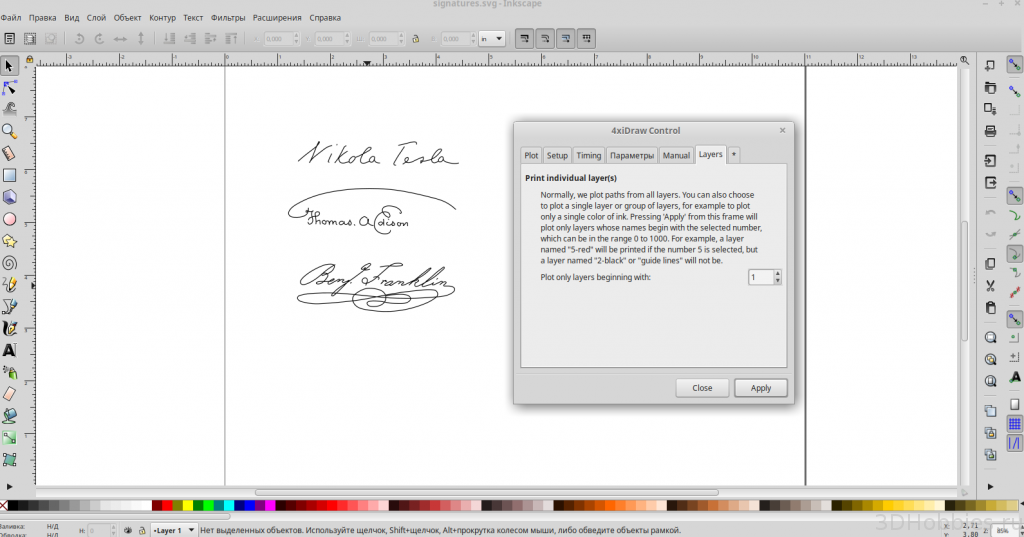
Для рисования я использую бесплатную векторную программу Inscape с плагином, который можете получить здесь .
Скачав плагин распаковываем и копируем содержимое папки inkscape driver в папку extensions в Linux Mint это /usr/share/inkscape/extensions
Запускаем inkscape идём Расширения > 4xiDraw > 4xiDraw Control
Для настройки правильного масштаба 4xiDraw, вам нужно будет перед началом рисования нужно настроить определённые параметры
для этого скачиваем программу Universal Gcode Sender открываем
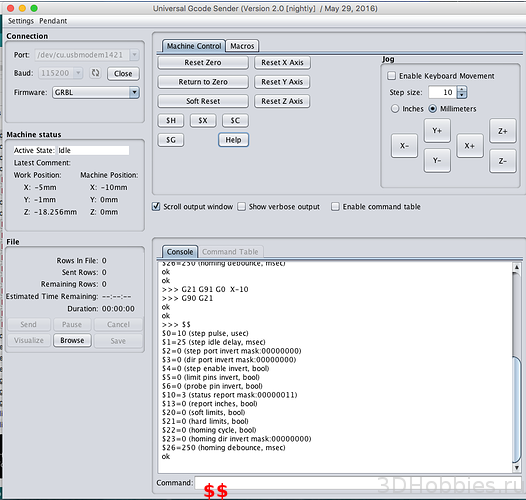
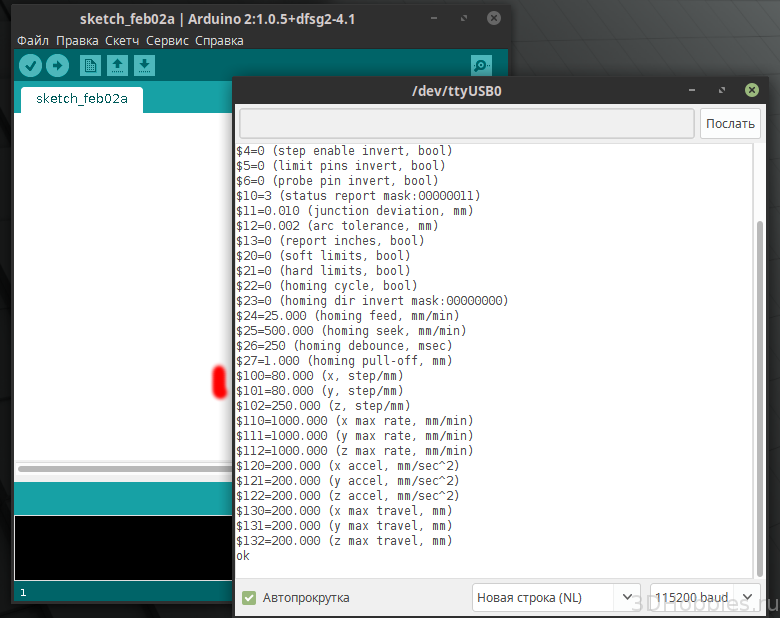
- Выбираем порт выставляем скорость подключаемся. Находим поле ввода команд набираем $$ + ENTER
- Настраиваем параметры $100 и $101. Эти параметры определяют, сколько шагов требуется плоттеру, чтобы пройти 1мм.
- Мы использовали двигатель на 200 шагов, шкив на 20 зубьев и ремень GT2 (шаг 2 мм), соответственно правильные значения для данных параметров будут равны 80
- Если вы используете шаговый двигатель с другим количеством шагов тогда введите «$ 100 = 80 + Enter» на терминале, чтобы отрегулировать ось X. Введите «$ 101 = 80 + Enter», чтобы настроить ось Y.
- Готово, ваш плоттер будет рисовать точно такие же размеры, как и ваш рисунок Inkscape
Данные действия можно сделать и при помощи программы Arduino IDE
Сервис > монитор порта
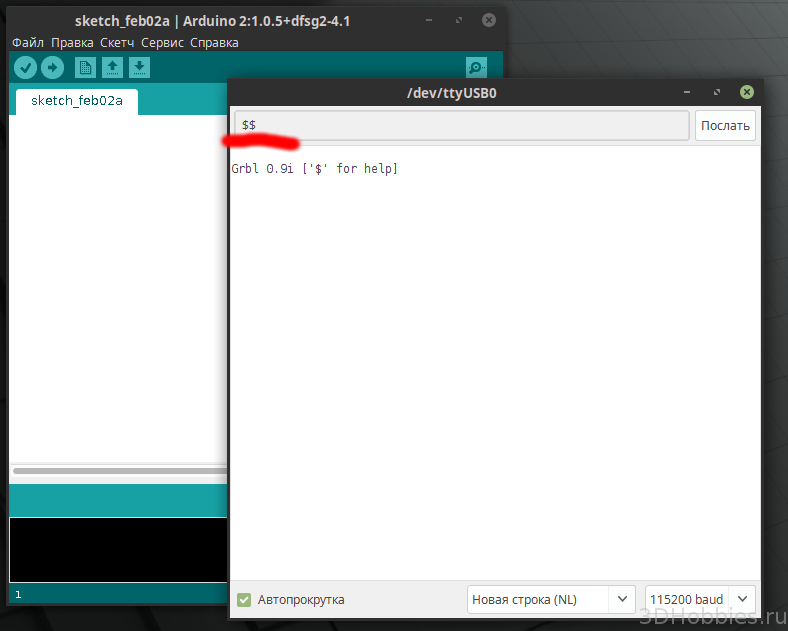
Для изменения определённого параметра например $100 наберите $100=80
Для сборки «4xiDraw» использовали:
2 шаговых двигателя nema 17 тут
4 8mm Гладкие стержни 2 шт. 400mm и 2 шт. 320mm (куплено в строительном магазине)
2 M10 Резьбовые стержни 400mm (куплено в строительном магазине)
8 LM8UU Линейные подшипники тут
2 GT2 Шкивы тут
10 F623ZZ подшипники тут
1 micro servo SG90 (плюс удлинитель кабеля 250 мм) тут
1 Arduino UNO тут
1 CNCshield тут
2 x Драйвер шагового двигателя A4988 тут
1 GT2 Ремень 1.4 метра тут
8 M10 гайки (куплено в строительном магазине)
8 30mm M3 Винты с гайками (куплено в строительном магазине)
8 6mm M3 Винты (куплено в строительном магазине)
4 16mm M3 Винты с гайками (куплено в строительном магазине)
4 M3 шайбы (куплено в строительном магазине)
2 15mm M3 винты (куплено в строительном магазине)
1 12V 2A блок питания (куплено в магазине электротоваров)
1 USB кабель (в любом магазине электроники)
1 Перьевая ручка ну или просто маркер 🙂